|
|
Login |
[#]
Разжёвываем линейно-квадратичный регулятор для управления перевёрнутым маятником
habrabot(difrex,1) — All
2016-05-20 17:30:03
# Преамбула
Продолжаю подробное описание использования линейно-квадратичного регулятора на примере управления перевёрнутым маятником. К слову сказать, термин «ЛКР» очень неточно отражает суть происходящего, как мне уже подсказали в комментариях, в русской школе теории управления этот подход называется «аналитическим конструированием регуляторов», что существенно точнее. _Как обычно, я стараюсь разжевать математику по-максимуму, чтобы материал был доступен заинтересованному школьнику. Я глубоко убеждён, что использование математики по-хорошему должно бы быть платным: любая формула должна быть использована только тогда, когда она призвана облегчить понимание, а не для того, чтобы выпендриваться._ Итак, это уже четвёртая статья, для лучшего понимания происходящего неплохо бы прочитать предыдущие три:
* 1\. [**Методы наименьших квадратов**][1]
* 2\. [**Линейно-квадратичный регулятор, вводная**][2]
* 3\. [**Управление двигателем постоянного тока при помощи линейно-квадратичного регулятора**][3]
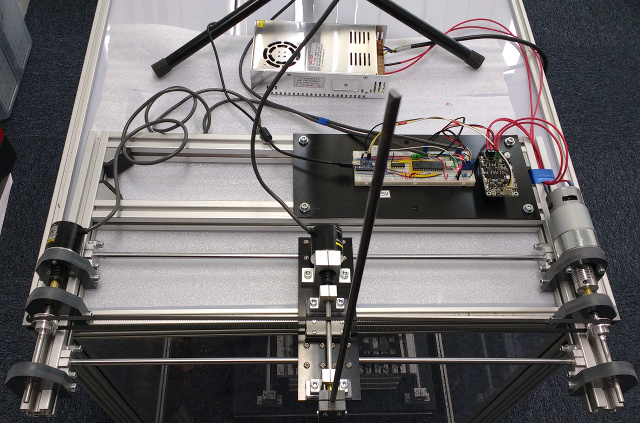
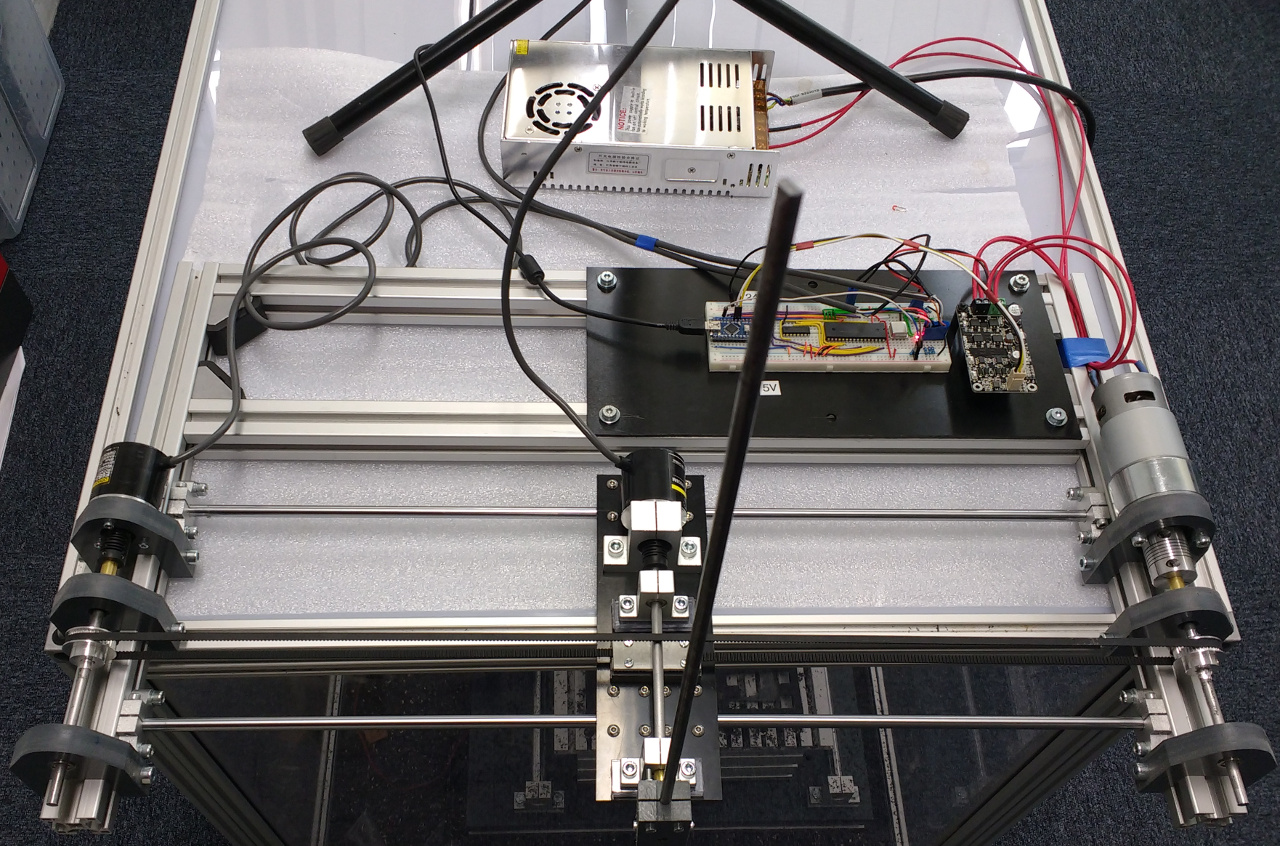
Вот фотография системы (кликабельно): [![][4]][5] [Читать дальше →][6]
[1]: https://habrahabr.ru/post/277275/
[2]: https://habrahabr.ru/post/277671/
[3]: https://habrahabr.ru/post/280486/
[4]: https://habrastorage.org/getpro/habr/post_images/d3f/c9f/b0e/d3fc9fb0eb13163ee9be6a54ec7bac47.jpg
[5]: https://raw.githubusercontent.com/ssloy/tutorials/master/tutorials/pendulum/doc/pendulum.jpg
[6]: https://habrahabr.ru/post/301276/?utm_source=habrahabr&utm_medium=rss&utm_campaign=feed_posts#habracut
habrabot(difrex,1) — All
2016-05-20 17:30:03
# Преамбула
Продолжаю подробное описание использования линейно-квадратичного регулятора на примере управления перевёрнутым маятником. К слову сказать, термин «ЛКР» очень неточно отражает суть происходящего, как мне уже подсказали в комментариях, в русской школе теории управления этот подход называется «аналитическим конструированием регуляторов», что существенно точнее. _Как обычно, я стараюсь разжевать математику по-максимуму, чтобы материал был доступен заинтересованному школьнику. Я глубоко убеждён, что использование математики по-хорошему должно бы быть платным: любая формула должна быть использована только тогда, когда она призвана облегчить понимание, а не для того, чтобы выпендриваться._ Итак, это уже четвёртая статья, для лучшего понимания происходящего неплохо бы прочитать предыдущие три:
* 1\. [**Методы наименьших квадратов**][1]
* 2\. [**Линейно-квадратичный регулятор, вводная**][2]
* 3\. [**Управление двигателем постоянного тока при помощи линейно-квадратичного регулятора**][3]
Вот фотография системы (кликабельно): [![][4]][5] [Читать дальше →][6]
[1]: https://habrahabr.ru/post/277275/
[2]: https://habrahabr.ru/post/277671/
[3]: https://habrahabr.ru/post/280486/
[4]: https://habrastorage.org/getpro/habr/post_images/d3f/c9f/b0e/d3fc9fb0eb13163ee9be6a54ec7bac47.jpg
{kind=link}
[5]: https://raw.githubusercontent.com/ssloy/tutorials/master/tutorials/pendulum/doc/pendulum.jpg
{kind=link}
[6]: https://habrahabr.ru/post/301276/?utm_source=habrahabr&utm_medium=rss&utm_campaign=feed_posts#habracut