|
|
Login |
[#]
Компьютерное зрение и мобильные роботы. Часть 1 — V-REP, Python, OpenCV
habrabot(difrex,1) — All
2016-04-08 20:00:02
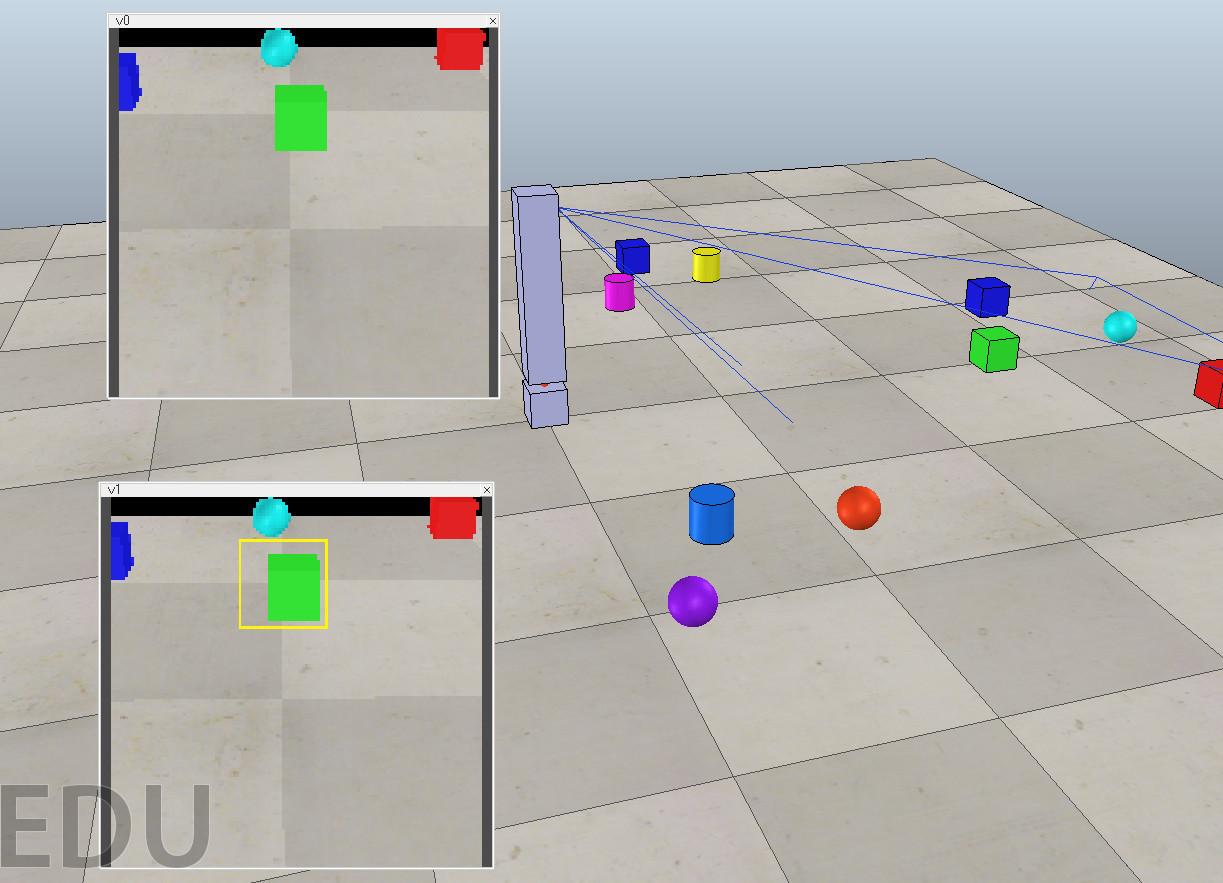
![][1] Когда прочитал [публикацию про запуск беспилотных гоночных автомобилей][2] — подумал, было бы интересно сделать что-то подобное. Конечно не гоночный болид, но по крайней мере мобильный робот, что ориентируется в пространстве посредством камеры — распознаванием образов. В нашем хакспейсе — создать робота не такая большая проблема. Но не у всех и не всегда есть возможность экспериментировать с реальным «железом» — поэтому интересно было попробовать решить задачу — в виртуальной среде, и после уже оживить «железо». Так и возникла идея серии статей, про решение простейшей задачи ориентации робота в пространстве — от виртуальной симуляции, до воплощения в реальном мобильном роботе: **Часть 1**. Настройка виртуальной среды, интеграция с python и OpenCV для распознавания образов из виртуального мира. **Часть 2**. Создание виртуального мобильного робота, алгоритм автономного перемещения (поиск объекта) **Часть 3**. Создание реального робота, перенос логики на него. Хочется добиться такого результата — чтобы python скрипт, управляющий виртуальным роботом — был бы максимально идентичным тому, что будет управлять реальным роботом. Мозгом робота будет микрокомпьютер RaspberryPi2 — на котором без проблем работает и python, и OpenCV. Таким образом необходимо состыковать систему виртуальной робототехники V-REP — с Python и OpenCV. Вот про это и будет первая часть — данная публикация.
Нарисуем архитектуру нашего мобильного робота. [Читать дальше →][3]
[1]: https://habrastorage.org/files/547/d05/396/547d0539640842a4904a2b3a0c1a22a6.jpg
[2]: https://geektimes.ru/post/266626/
[3]: https://habrahabr.ru/post/281186/#habracut
habrabot(difrex,1) — All
2016-04-08 20:00:02
![][1] Когда прочитал [публикацию про запуск беспилотных гоночных автомобилей][2] — подумал, было бы интересно сделать что-то подобное. Конечно не гоночный болид, но по крайней мере мобильный робот, что ориентируется в пространстве посредством камеры — распознаванием образов. В нашем хакспейсе — создать робота не такая большая проблема. Но не у всех и не всегда есть возможность экспериментировать с реальным «железом» — поэтому интересно было попробовать решить задачу — в виртуальной среде, и после уже оживить «железо». Так и возникла идея серии статей, про решение простейшей задачи ориентации робота в пространстве — от виртуальной симуляции, до воплощения в реальном мобильном роботе: **Часть 1**. Настройка виртуальной среды, интеграция с python и OpenCV для распознавания образов из виртуального мира. **Часть 2**. Создание виртуального мобильного робота, алгоритм автономного перемещения (поиск объекта) **Часть 3**. Создание реального робота, перенос логики на него. Хочется добиться такого результата — чтобы python скрипт, управляющий виртуальным роботом — был бы максимально идентичным тому, что будет управлять реальным роботом. Мозгом робота будет микрокомпьютер RaspberryPi2 — на котором без проблем работает и python, и OpenCV. Таким образом необходимо состыковать систему виртуальной робототехники V-REP — с Python и OpenCV. Вот про это и будет первая часть — данная публикация.
Нарисуем архитектуру нашего мобильного робота. [Читать дальше →][3]
[1]: https://habrastorage.org/files/547/d05/396/547d0539640842a4904a2b3a0c1a22a6.jpg
{kind=link}
[2]: https://geektimes.ru/post/266626/
[3]: https://habrahabr.ru/post/281186/#habracut