|
|
Login |
[#]
Ускоряем запуск BeagleBone или runit не для чайников
habrabot(difrex,1) — All
2015-08-06 17:00:04
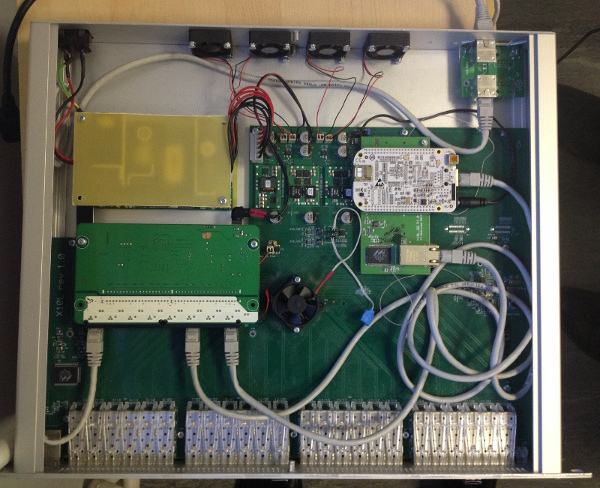
![][1] В устройствах, которые мы разрабатываем и производим, требуется быстрый запуск после холодного старта. Для приборов без полноценной операционной системы (в них мы используем NutOS, он же EtherNut) такой проблемы нет — они готовы к работе через пару секунд после включения. Зато в более сложных и продвинутых, с linux внутри, и особенно в портативных измерительных системах, вопрос ускорения алгоритмов инициализации более чем актуален. В пилотной версии своего коммутатора 10G ethernet мы использовали хорошо известную плату [Beaglebone][2] и процесс загрузки, если не считать qemu-эмулятор, с удовольствием отлаживали на ней. Кстати, эта пилотная версия 10-гигабитного свича с управляющей beaglebone-платой (на фотографии к статье) стоит у нас в серверной и пару лет успешно работает, Сразу скажу, что переход на [runit][3] дал ускорение запуска системы на 500MHz arm-процессоре **с полминуты до шести с копейками секунд**. _Disclaimer: эта заметка была написана для внутреннего wiki нашей компании, и, поскольку далеко не все разработчики ПО системные администраторы, я посчитал нужным объяснить некоторые моменты максимально простым и понятным языком._ [Читать дальше →][4]
[1]: https://habrastorage.org/files/266/746/a49/266746a4900c461ca3c34df4803f73b3.jpg
[2]: http://beagleboard.org/bone
[3]: http://smarden.org/runit
[4]: http://habrahabr.ru/post/264263/#habracut
habrabot(difrex,1) — All
2015-08-06 17:00:04
![][1] В устройствах, которые мы разрабатываем и производим, требуется быстрый запуск после холодного старта. Для приборов без полноценной операционной системы (в них мы используем NutOS, он же EtherNut) такой проблемы нет — они готовы к работе через пару секунд после включения. Зато в более сложных и продвинутых, с linux внутри, и особенно в портативных измерительных системах, вопрос ускорения алгоритмов инициализации более чем актуален. В пилотной версии своего коммутатора 10G ethernet мы использовали хорошо известную плату [Beaglebone][2] и процесс загрузки, если не считать qemu-эмулятор, с удовольствием отлаживали на ней. Кстати, эта пилотная версия 10-гигабитного свича с управляющей beaglebone-платой (на фотографии к статье) стоит у нас в серверной и пару лет успешно работает, Сразу скажу, что переход на [runit][3] дал ускорение запуска системы на 500MHz arm-процессоре **с полминуты до шести с копейками секунд**. _Disclaimer: эта заметка была написана для внутреннего wiki нашей компании, и, поскольку далеко не все разработчики ПО системные администраторы, я посчитал нужным объяснить некоторые моменты максимально простым и понятным языком._ [Читать дальше →][4]
[1]: https://habrastorage.org/files/266/746/a49/266746a4900c461ca3c34df4803f73b3.jpg
{kind=link}
[2]: http://beagleboard.org/bone
[3]: http://smarden.org/runit
[4]: http://habrahabr.ru/post/264263/#habracut