|
|
Login |
[#]
Виртуальный квадрокоптер на Unity + OpenCV (Часть 3)
habrabot(difrex,1) — All
2015-12-05 14:30:03
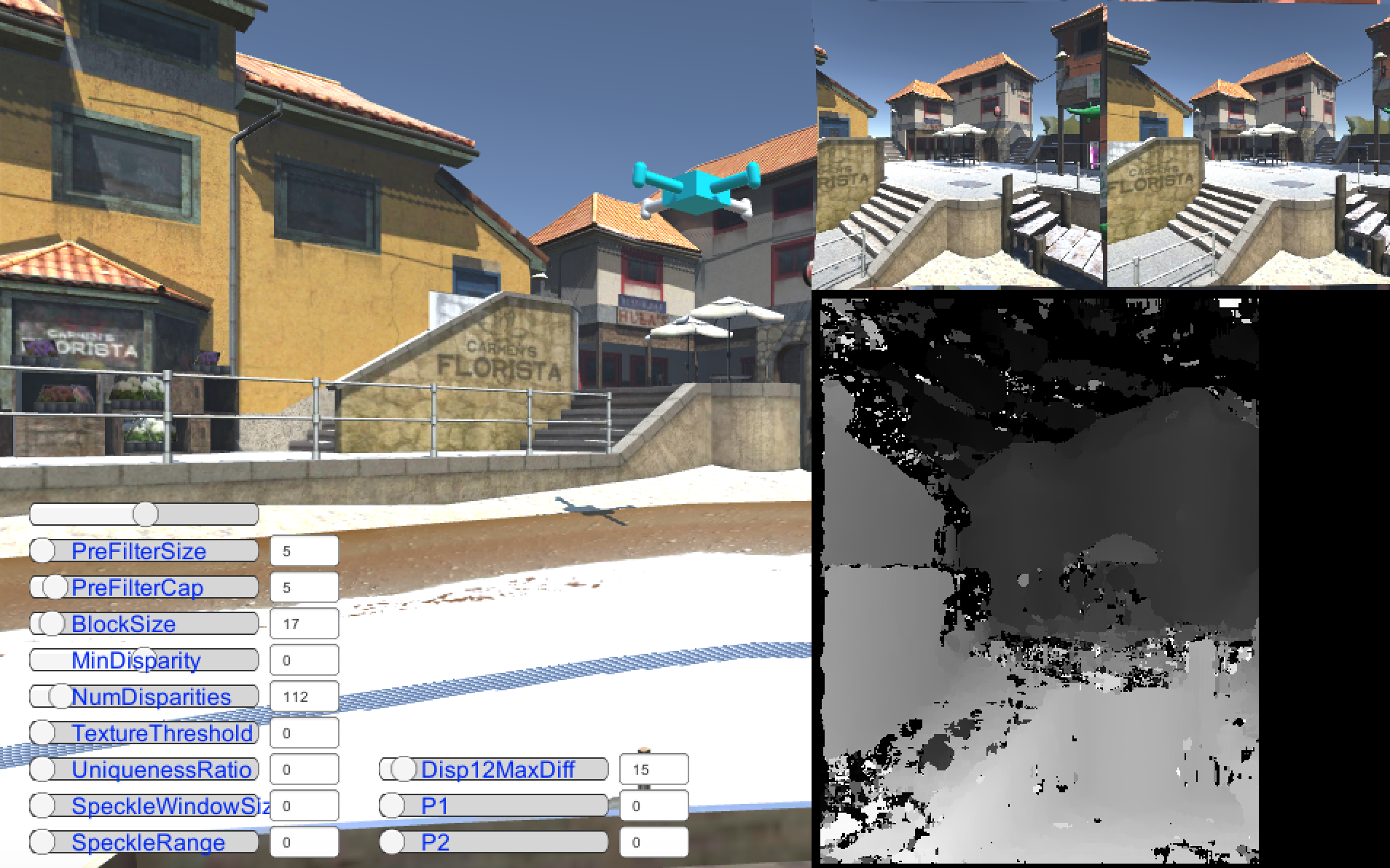
![КПДВ][1] Всем привет! Сегодня я хотел бы продолжить серию о том, как подружить Unity, C++ и OpenCV. А также, как получить виртуальную среду для тестирования алгоритмов компьютерного зрения и навигации дронов на основе Unity. В предыдущих статьях я рассказывал о том, [как сделать виртуальный квадрокоптер в Unity][2] и [как подключить C++ плагин, передать туда изображение с виртуальной камеры и обработать его посредством OpenCV][3]. В этой статье я расскажу как сделать из двух виртуальных камер на квадрокоптере стереопару и как получить карту смещений (disparity map), которую можно использовать для оценки глубины пикселей изображения. [Читать дальше →][4]
[1]: https://habrastorage.org/files/615/d6d/2af/615d6d2af5d64a1b8ee955dae6e5aef8.png
[2]: http://habrahabr.ru/post/267791/
[3]: http://habrahabr.ru/post/269007/
[4]: http://habrahabr.ru/post/271337/#habracut
habrabot(difrex,1) — All
2015-12-05 14:30:03
![КПДВ][1] Всем привет! Сегодня я хотел бы продолжить серию о том, как подружить Unity, C++ и OpenCV. А также, как получить виртуальную среду для тестирования алгоритмов компьютерного зрения и навигации дронов на основе Unity. В предыдущих статьях я рассказывал о том, [как сделать виртуальный квадрокоптер в Unity][2] и [как подключить C++ плагин, передать туда изображение с виртуальной камеры и обработать его посредством OpenCV][3]. В этой статье я расскажу как сделать из двух виртуальных камер на квадрокоптере стереопару и как получить карту смещений (disparity map), которую можно использовать для оценки глубины пикселей изображения. [Читать дальше →][4]
[1]: https://habrastorage.org/files/615/d6d/2af/615d6d2af5d64a1b8ee955dae6e5aef8.png
{kind=link}
[2]: http://habrahabr.ru/post/267791/
[3]: http://habrahabr.ru/post/269007/
[4]: http://habrahabr.ru/post/271337/#habracut